At the end of the 19th century, when bicycles came into use, it was necessary to obtain a license for them. An authoritative committee was assembled to teach the theory and practice of driving and to issue license plates. It was not allowed to give the vehicle to anyone. The reason for caution was explained by the increased risk of driving a two-wheeler. It is impossible for an ordinary person to understand why a bicycle does not fall while moving. Surprisingly, even physicists who study the workings of wheeled systems cannot unequivocally answer the simple question.
Theoretical analysis and physical experiments have shown that gyroscopic torque and positive fork reach are not sufficient for bike stability. In addition to controlled steering, there is also automatic steering. Moreover, load distribution plays a key role in maintaining balance. As you can see, with the fairly long life of the bike, new qualities are still being discovered and refined.
What are the reasons why a bicycle doesn’t fall over when it rides
To explain the easy task, a metaphor is often used: “it’s as elementary as riding a bicycle.” In fact, one has to keep the means of transportation from falling. At first it was thought that the bicycle rides at the expense of the rider. The person senses the inclination of the structure, turns the handlebars slightly in the direction of the fall and levels the movement. But at high speed, the bike gains stability and will not fall even when the handlebars are released. Later there were hypotheses about the gyroscopic action of the front wheel and steering. But it turned out that unguided bikes and robot cyclists do not fall either.
The main question about the cause of stability is this: what causes the corresponding relationship between tilt and turn? There is a generally accepted view: the effect occurs as a consequence of rotational (gyroscopic) torque and positive fork outreach. The stabilizing effect of the front wheel, the centrifugal force that occurs when the movement deviates from a straight path, are necessary factors for the equilibrium of the bicycle.
In terms of physics.
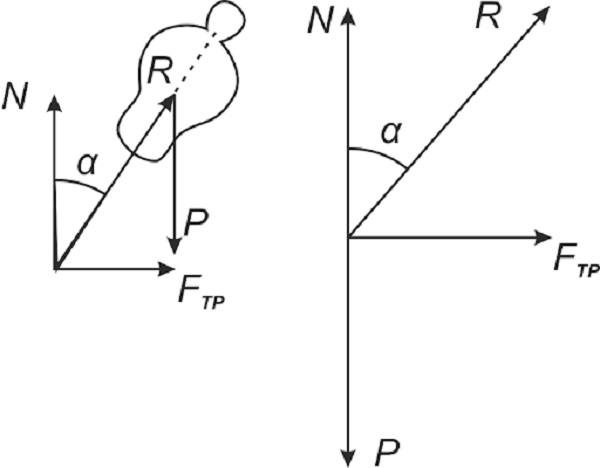
Scientists have determined the pattern that maintains the stability of two-wheeled transport. The main place is occupied by the front fork. The device provides for an inclined position of the axis of the handlebars in relation to the ground. The crossing point is located in front of the line of contact of the bicycle wheel with the road. If the angle of the castor deviates from the set value, a reactive force is generated, returning the transporter to its place. This is how the bike itself helps keep the balance.
To make a turn, the rider must change the center of gravity. For example, when the bike is tilted to the right, the front axle is also tilted to the right, and the wheel, rotating clockwise (when viewed from below), partially transfers the reactive torque to the steering assembly. The centrifugal force tends to turn the steering wheel to the right. To make the turn, the cyclist leans to the left, deflecting the bike and wheels to the right.
The second factor used for vehicle stability is speed gain when slowing down and steering. The stabilizing action returns the wheels to the correct position and keeps the bike from falling over. An experienced cyclist, holding on to the mounts with his hands, steers while riding by only 2-3 mm.
Gyroscopic Effect
The theory of equilibrium is based on a well-known physical phenomenon used in space, aviation, and marine navigation. The property of a rotating object to maintain the direction of motion is called the gyroscopic force. The action is seen when riding a bicycle while it is tilted. As long as the wheels are spinning, the vehicle keeps its balance and never falls over. For example, a yuletide or a child’s helicopter “work” only when spinning. To test the hypothesis, physicists created a special bike design. In front, they installed an additional wheel, which did not touch the ground and rotated in the opposite direction. The result of the experiment surprised the scientists. The bike moved perfectly and did not fall down without a gyroscope.
Thus, having confirmed the main factors affecting the stability of the two-wheeler in motion, scientists continue to discuss new versions.
Interesting facts
V.A. Yakubovich.
- The mathematical theory explaining the stability of the bicycle in motion was put forward by Doctor of Sciences V.A. Yakubovich. The scientist explained why it was never possible to create an autonomous robot controlling the bike. The information about mechanical cyclists spread on the Internet turned out to be a fake. A closer look at the cyberneticist revealed a number of tricks. Inventors attached a load that increased the stability of the structure, lowered the center of gravity, and accelerated the riding bike to high speeds.
Opponents of the scientist prove otherwise. The robot learns very quickly. This is due to the relative simplicity of its tasks: you only need to learn how to maintain balance. At the same time, the robot has capabilities inaccessible to humans: it has instant reaction and “twitches” the wheel 5 times per second.
- A bicycle without a rider can automatically steer itself not to fall down, – the American scientists claim. Thanks to linearized stability calculations, the researchers have designed a bike with extra wheels spinning in the opposite direction and negative handlebar endurance.
- The opinion of psychologists differs from the physicists’ hypotheses. The bike’s energy sources are in the rider’s head. The human brain works hard to keep us from falling. The skill and lies in the subconscious attitudes that keep the cyclist balanced, maintaining a state of equilibrium.
Conclusion
Evidence supports the importance of the gyroscope and castor in keeping the bike stable while riding. But there is no unequivocal explanation as to why a bicycle does not fall while riding. Perhaps there is an additional force whose understanding is temporarily beyond current knowledge.






Still, I think the bike does not fall while riding because the rider keeps his balance and corrects it by turning the handlebars in the direction of the fall. The effect of gyroscopic torque on the wheel when riding is unlikely, the speed of the wheel, and its mass is not great to create reactive torque.
The steering experiment did not confirm that the rider holds the balance. Push the bike hard without the rider, it will ride and not fall, even if the rudder is jammed.
This is an interesting post! It’s amazing how balance, friction and momentum work together to keep a bike upright while riding. Learning more about the physics behind this phenomenon is fascinating!